The Environment Agency has used lasers to scan and map the English landscape from above since 1998. This LiDAR (Light Detection and Ranging) technology is also publicly available and has proved particularly helpful to archaeologists seeking to map ancient features, such as Roman roads that have been ‘lost’, some for thousands of years. Lancashire’s Roman roads have been researched by David Ratledge for more than 45 years and now thanks to the LiDAR data it was possible to discover 17km of a ‘lost’ Roman road from Ribchester to Lancaster.
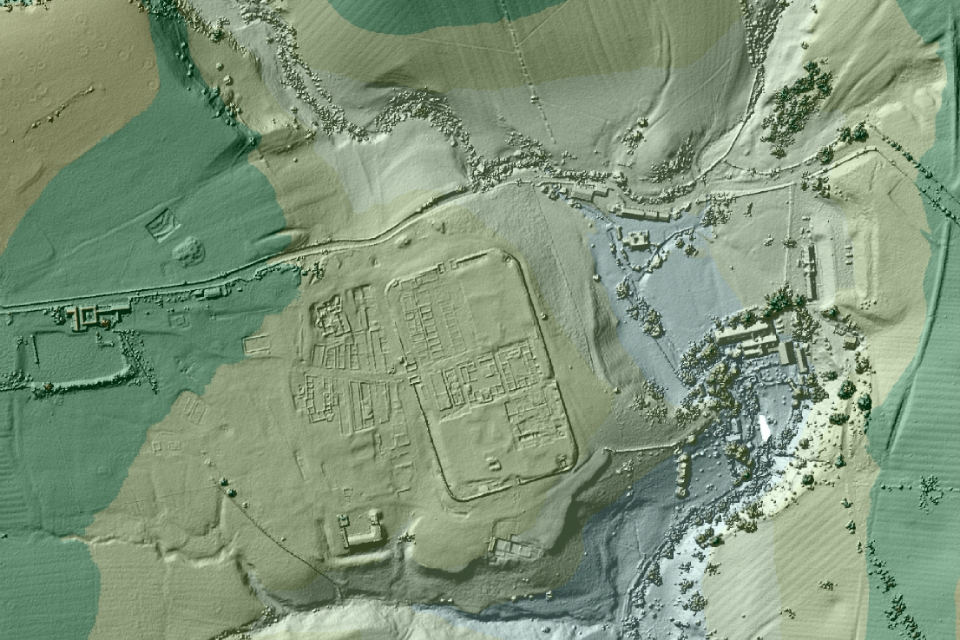
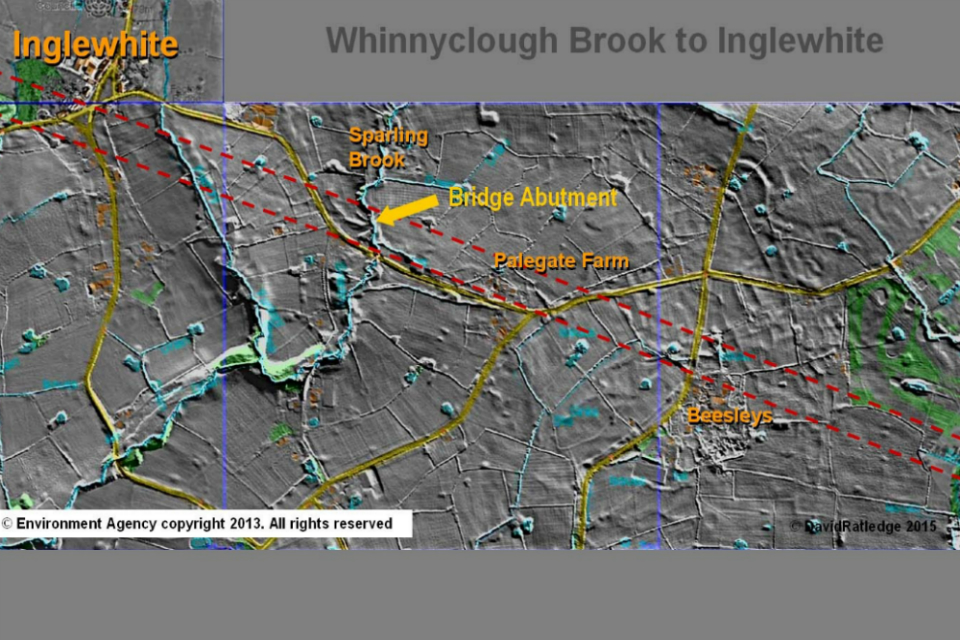
The newly discovered section of the Roman road took a very sensible and economical route via Longridge and Inglewhite to Catterall, near Garstang. Here it joined the main Roman road from the south heading to Lancaster. Roman roads were large structures, typically measuring 5-7 metres wide and reaching a height of around 0.5m in the centre. However, nearly two thousand years of weathering mean that they are often very difficult to spot at ground level. The preservation of the remains varies massively. Parts of a road could still be half a metre high and easy to spot whilst in other parts it could be so subtle that you’d definitely miss it on the ground.
Experts Hugh Toller and Bryn Gethin have found at least 4 ‘lost’ Roman roads around the country using LiDAR. In Cumbria, Hugh has used LiDAR data to prove the course of a road from the Roman fort at Low Borrowbridge, near Penrith, to Kirkby Thore, the site of a Roman cavalry camp. This is a missing part of a well known road called the Maiden Way. LIDAR also provides evidence for a new section of this road past Kirkland.
(after gov.uk)